

Meet the Team
We’re a small but mighty team, working across education & learning experience, product & development, sales & marketing, logistics & customer support. Get in touch if you’d like to chat to us.



Founder & CEO
Sandy is Marty the Robot’s inventor. Sandy has a MEng in robotics from Heriot-Watt University, MSc in computational neuroscience and PhD in robotics from the University of Edinburgh, specialising in walking robots.


Office Manager
Christine keeps the entire team in check and takes care of Robotical’s accounts. She is responsible for the logistics function of the business, organising Robotical’s support centre and making sure all queries get to the right person for a speedy reply.


Lead Developer
Nikos is responsible for the user-facing aspects of the website and mobile applications. Besides being a developer, Nikos has also a PhD in Cognitive Neuroscience. He is looking for ways to combine his backgrounds and find integrated solutions to make Marty’s user interface more fun and appealing!

Head of North America
With +20 years of experience in tech, Hal leads on strategy and implementation in North America, including growing market share and the distributor network. Hal enjoys travelling with Marty across North America to meet our partners and customers at various shows and events.

Content & Marketing Manager
Jane joined the Robotical team in 2023. Her role involves developing digital content, building brand awareness, and engaging with Marty fans in schools and businesses across the globe.

Chairman
Rob is a serial entrepreneur, technology investor, engineer and obsessive maker. Rob founded Actix in 1991 and, as CEO, built a highly profitable business to over £25m revenue, 250 staff and 12 offices worldwide. Besides Robotical, Rob currently chairs DevicePilot, and is a director of Singletrack and Float.

Non-Executive Director
Professor Emeritus David Lane CBE FREng FRSE is a scientist, innovator, educator, and investor in Robotics & AI.
Over a 40-year academic career, he co-founded the Edinburgh Centre for Robotics and the National Robotarium, publishing 300+ peer-reviewed papers on advanced cognition, sensing, and bio-inspired unmanned systems. He led the 2014 UK RAS2020 Strategy, serves on the UK Government’s AI Council, and co-chairs the UK Robotics Growth Partnership.


Non-Executive Director
Nat is Robotical’s former Marketing Director, now serving on the board as a NED. With a background in marketing, brand and digital, Nat helps advise and steer the ship from the sidelines. She continues to be inspired by Robotical’s mission to bring learning alive and by all the teachers around the world who are helping inspire the next generation of STEM leaders.
Dr Sandy Enoch leads a team at Three-Day Startup Edinburgh to test the concept with different robot prototypes.
At University of Edinburgh’s Inspire, Launch, Grow Competition with Archie – a Marty prototype.

Launched in summer 2016, our first crowdfunding campaign raised £106,529 from 893 backers. This paid for our first batch of Martys to be produced.

Our first summer intern joins Robotical, followed by employee number two.
Runner up in EU Robotics Entrepreneurship Awards, Scottish EDGE Win, Converge Challenge Design & Creativity Award.
We started shipping Martys to our backers in July 2017, but first we had to print an enormous amount of parts, calibrate 6,000 servos, bag 120,000 screws, nuts and bolts and box 14,000 threaded inserts. Yeesh!
This allows us to continue with and scale up production, build the team and start planning for Marty the Robot V2.
That’ll be to Wise Club in South Korea, who ordered 1,000 Martys. Our biggest order up until then.

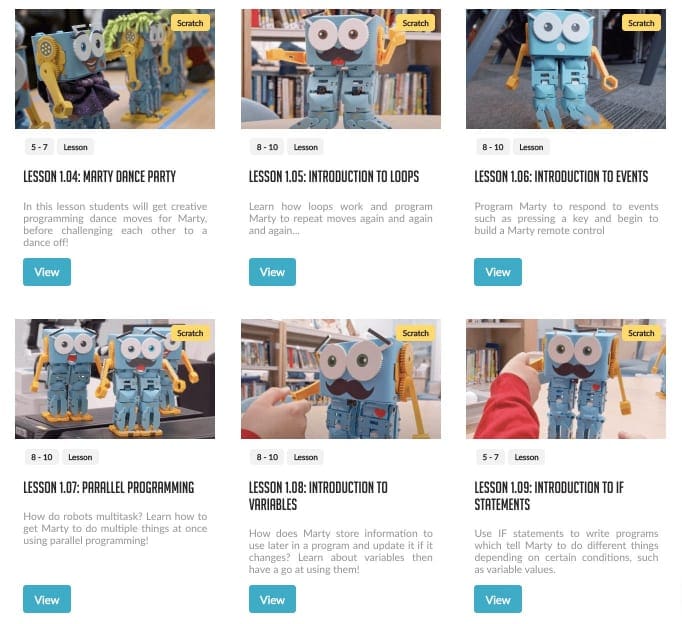
Curriculum-aligned Marty lessons start coming out.
Marty is featured in the National Museum of Scotland’s robots exhibition.

Development for Marty V2 actually started in 2018 – it had a really long gestation period!
And shipped to 200 schools around the UK and various distributors around the world. Some of our biggest Kickstarter backers also receive some special edition add-ons.
The team is growing fast and Robotical makes key hires in marketing, education and development.
Are you looking for new STEM resources for your classroom? Robotical is loaning Marty the Robot to schools for no-obligation, two-week trials.
