1. Welcome!
2. What’s in the box?
3. Battery placement
4. Turning Marty On!
5. Updating Marty!
6. Unplugged
7. The App
8. Connecting to the App
9. Remote Controller
10. MartyBlocks Jr
11. MartyBlocks
12. Learning Portal
13. Support
Over the next few screen, I'll introduce you to my features and how to get started.
What's in the box?
Putting the battery in
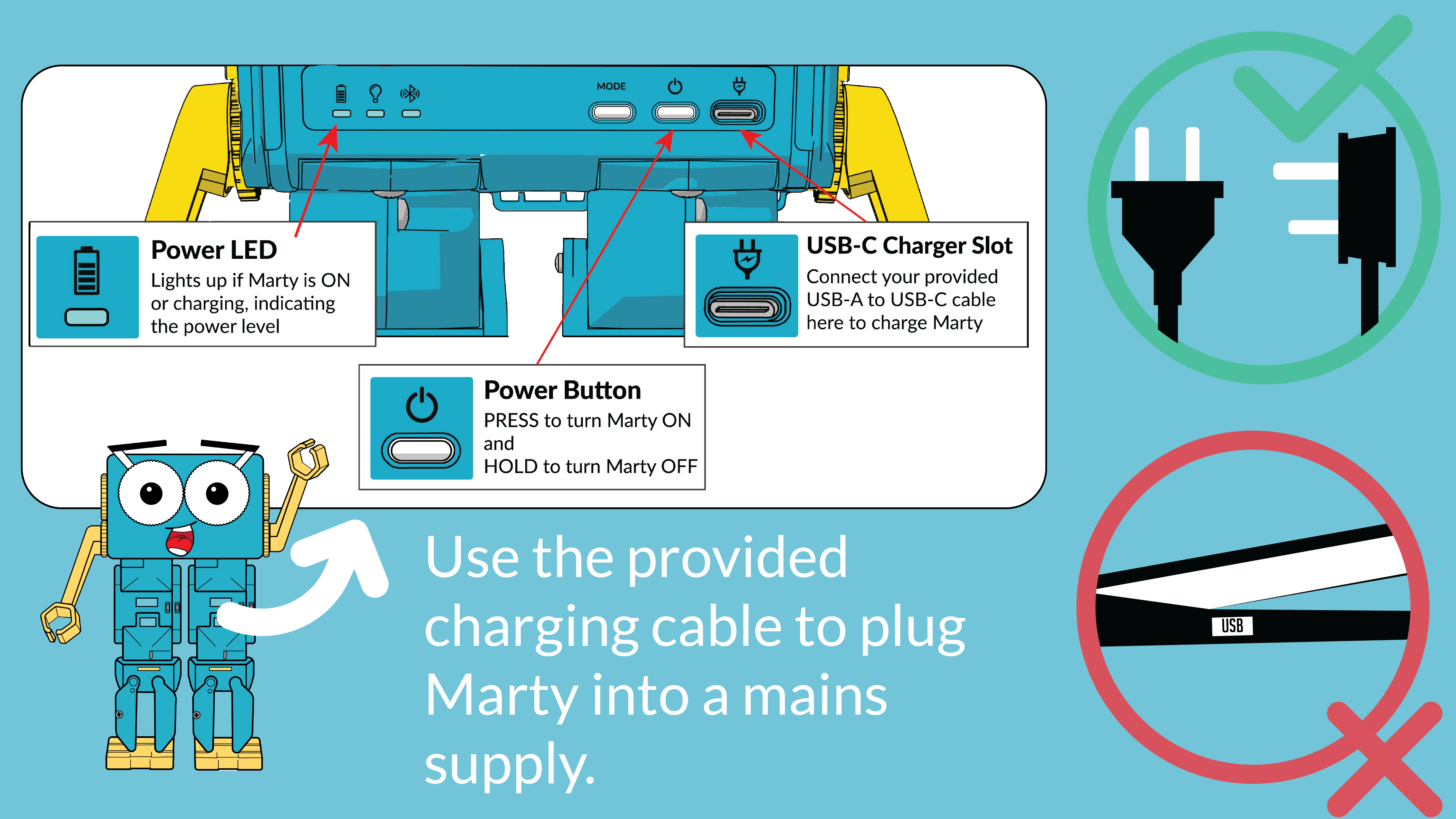
Charging
Placing the battery
Switching Marty On & LED indicators
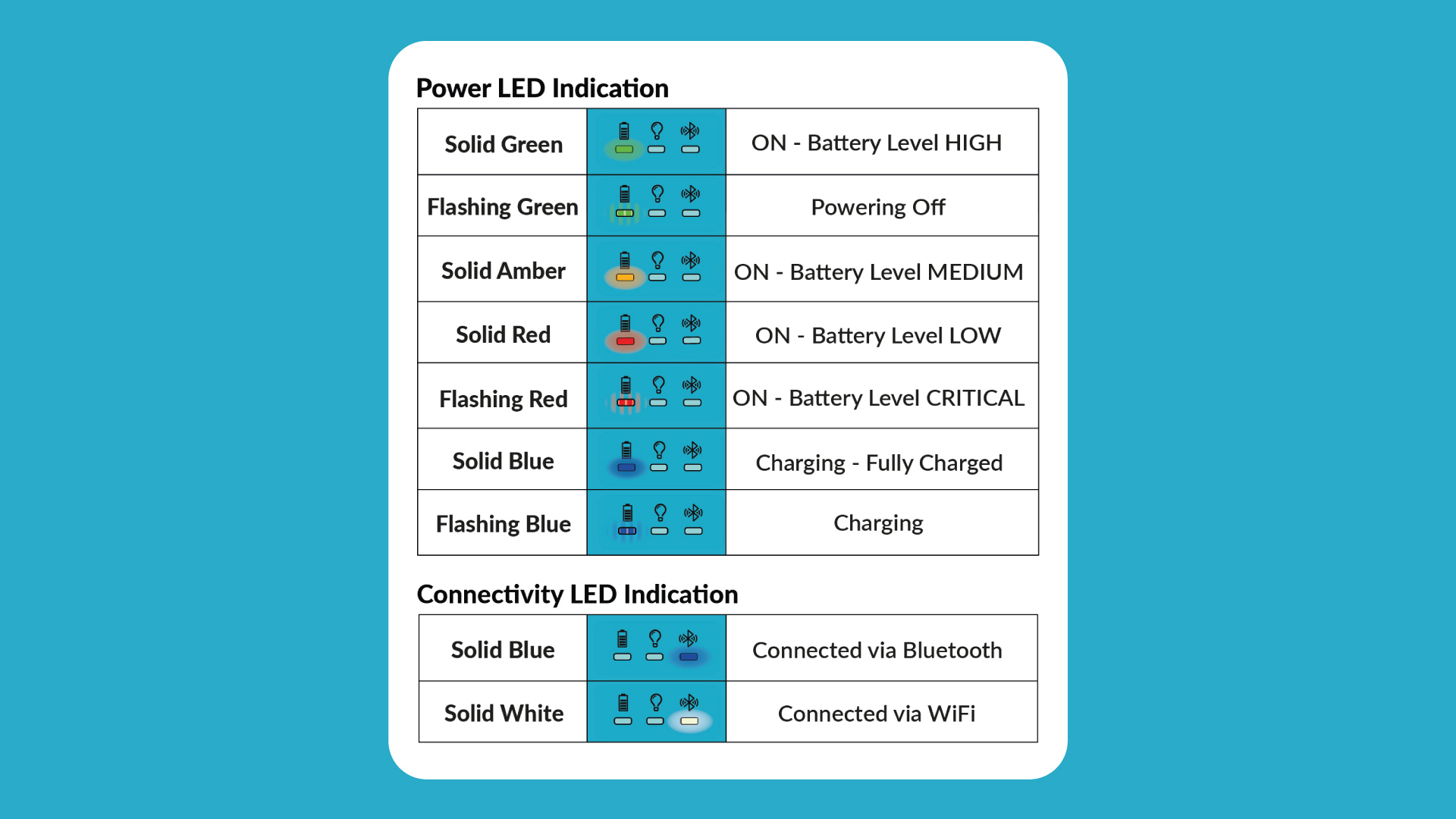
LED Indicators
Switching Marty On
Upgrade Marty for an Enhanced Experience
To fully take advantage of Marty's capabilities, make sure you're running the latest version. Updating gives you immediate access to new features, as well as vital performance enhancements.
Unplugged
Marty the Robot V2 Application
Download the app from the App Store

Download the app from the Play Store
Open the web app in your browser
Connecting to the App
Make sure you have Bluetooth enabled!
Remote Controller
MartyBlocks Jr
MartyBlocks
Learning Portal
Help & Support
Head to Knowledge Base for:
Email support@robotical.io with any questions
We hope you enjoy your Marty!